56
Publicado:
Especialistas japoneses lograron un hito al emplear pequeñas perforaciones cuidadosamente diseñadas para unir piel artificial viva a las estructuras rígidas de los robots.
Un grupo de ingenieros dirigidos por el profesor Shoji Takeuchi, de la Universidad de Tokio (Japón), lograron anclar tejido cutáneo vivo a las estructuras rígidas de robots humanoides, lo que les permitiría tener una mayor movilidad, capacidades de autocuración y de detección integradas, así como también una apariencia cada vez más real.
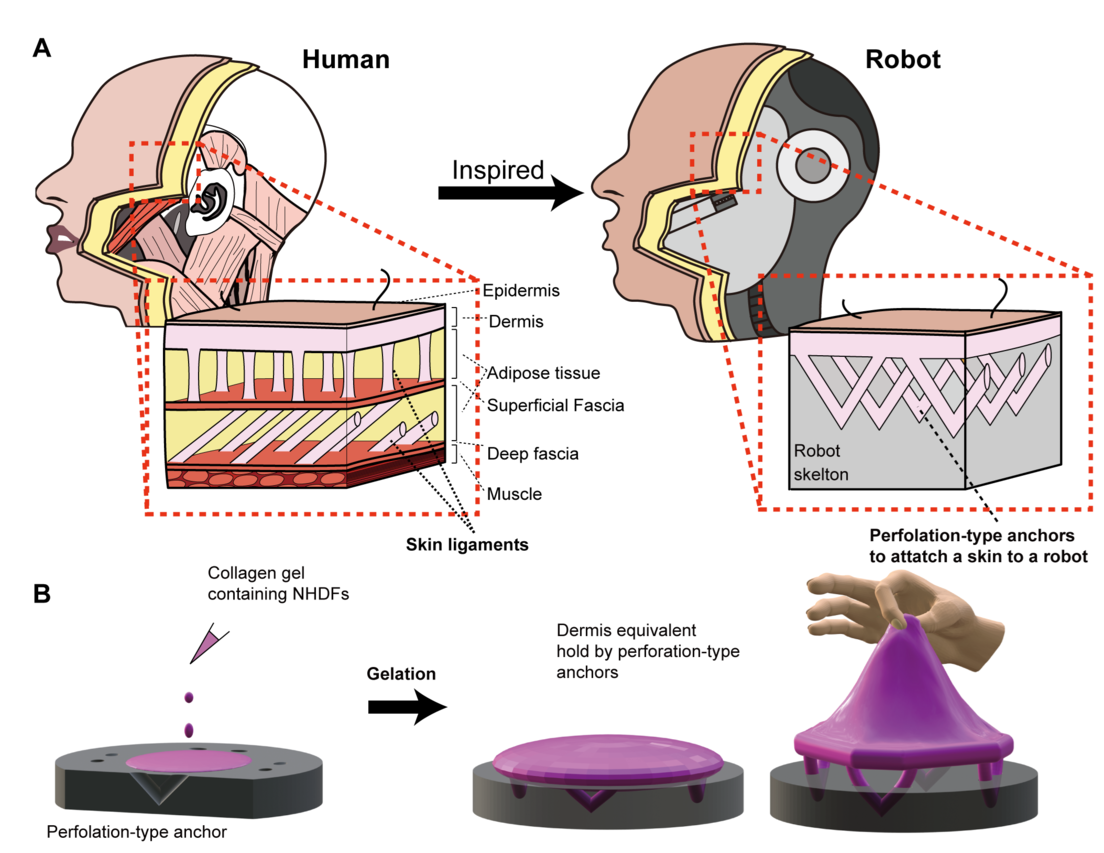
Inspirándose en los ligamentos de la piel humana, el equipo diseñó en la cara rígida de un robot perforaciones especiales que ayudaron a que una capa de piel cultivada en laboratorio se fijara firmemente a esa estructura. Su investigación podría ser útil en la industria cosmética y ayudar a formar a los cirujanos plásticos.
“Durante una investigación previa sobre un robot con forma de dedo cubierto de tejido diseñado de piel que cultivamos en nuestro laboratorio, sentí la necesidad de mejorar la adherencia de los elementos del robot y la estructura subcutánea de la piel“, comentó Takeuchi.

“Imitando las estructuras de la piel y los ligamentos humanos y utilizando perforaciones en forma de V especialmente hechas en materiales sólidos, encontramos una manera de unir la piel a estructuras complejas. La flexibilidad natural de la piel y el fuerte método de adhesión hacen que la piel pueda moverse con los componentes mecánicos del robot sin desgarrarse ni descamarse“, explica el profesor.
Ventajas y obstáculos del nuevo enfoque
Los métodos anteriores para unir tejido cutáneo a superficies sólidas implicaban elementos como minianclas o ganchos, pero estos limitaban el tipo de superficie capaz de recibir recubrimientos cutáneos y podían causar daños durante el movimiento. En cambio, los especialistas explican que, al diseñar cuidadosamente pequeñas perforaciones, se puede aplicar piel a prácticamente cualquier clase de superficie.
El uso de un gel de colágeno especial para la adhesión, que es naturalmente viscoso y de difícil introducción en las minúsculas perforaciones, fue clave en el éxito del nuevo enfoque. El equipo utilizó una técnica común para la adherencia de plástico, el tratamiento con plasma, para atraer el colágeno hacia las estructuras finas de las perforaciones, salvando así ese inconveniente. Con ese procedimiento, también lograron sujetar la piel cerca de la superficie en cuestión.
“Manipular tejidos biológicos blandos y húmedos durante el proceso de desarrollo es mucho más difícil de lo que la gente ajena al campo podría pensar. Por ejemplo, si no se mantiene la esterilidad, pueden entrar bacterias y el tejido morirá“, subrayó Takeuchi. “Sin embargo, ahora que podemos hacer esto, la piel viva puede aportar una variedad de nuevas habilidades a los robots”, añade.
Logros y desafíos
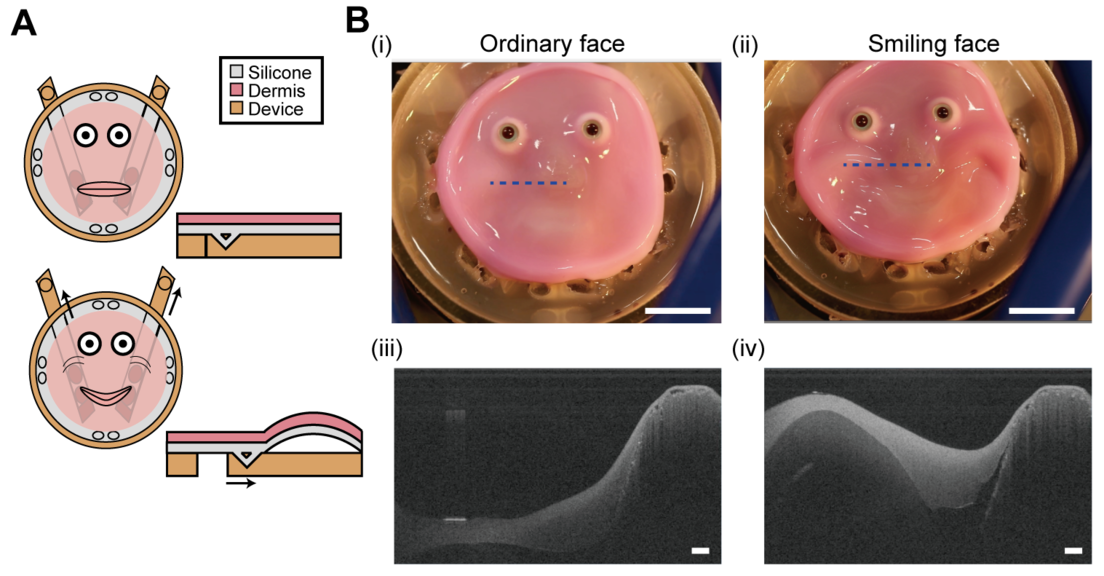
“En este estudio, logramos replicar la apariencia humana hasta cierto punto, creando un rostro con el mismo material de superficie y estructura que los humanos”, indicó Takeuchi. En un artículo publicado este martes en Cell Reports Physical Science, los autores afirmaron que construyeron una cara robótica recubierta con un análogo de la piel, capaz de expresar sonrisas.
Takeuchi expuso que, a través de esta investigación, identificaron “nuevos desafíos, como la necesidad de arrugas superficiales y una epidermis más gruesa para lograr una apariencia más humana. Creemos que crear una piel más gruesa y realista se puede lograr incorporando glándulas sudoríparas, glándulas sebáceas, poros, vasos sanguíneos, grasa y nervios”.
Asimismo, sostuvo que el movimiento “también es un factor crucial, no solo el material, por lo que otro desafío importante es crear expresiones similares a las humanas mediante la integración de actuadores o músculos sofisticados dentro del robot”. “Crear robots que puedan curarse a sí mismos, sentir su entorno con mayor precisión y realizar tareas con destreza humana es increíblemente motivador“, aseguró.